Traitement d'images
La manip' du pendule optique
Logiciels / Graphisme photo et vidéo

archimedium Membre non connecté
-

- Voir le profil du membre archimedium
- Inscrit le : 07/08/2012
- Site internet
- Groupes :
Reprise du message précédent
Trois drones volent entre des forêts d'arbres. Grâce au flot optique (DIS OpenCV) mesuré sur les images successives, la "disparité temporelle" révèle la forêt d'arbres (3ème dimension) ...1er drone
2ème drone
3ème drone
L'intérêt pour la forêt ici, vient du fait que les trajectoires sont courbes, afin d'éviter les obstacles. Elles se mesurent grâce à une transformée projective, et sont représentées par les paramètres <Ry,Rz,Tx,Tz> grâce à POV-Ray dans l'espace. L'évolution du drone est présentée de face avec sa caméra.
Édité par archimedium Le 19/04/2024 à 16h10
archimedium Membre non connecté
-
- Voir le profil du membre archimedium
- Inscrit le : 07/08/2012
- Site internet
- Groupes :
https://www.youtube.com/watch?v=WJ20EBM3PTc
Lorsque les deux vues de la même scène sont éloignées dans l'espace, on parle de "disparité spatiale". Dans le cas présent, les deux points de vue sont éloignés dans le temps, et l'on parle alors de "disparité temporelle". Il s'agit de savoir si les deux images de la même scène, sont acquises simultanément, ou de façon différée dans le temps. On peut percevoir le relief en profondeur dans ce cas là, avec une seule caméra, et son flux vidéo continu.
Édité par archimedium Le 17/10/2024 à 14h37
archimedium Membre non connecté
-
- Voir le profil du membre archimedium
- Inscrit le : 07/08/2012
- Site internet
- Groupes :
https://www.youtube.com/watch?v=34zUDqEzHos
Un drone vole au milieu des arbres de la forêt domaniale d'Écault. Grâce au flot-optique que l'on mesure sur les images successives, la disparité-temporelle laisse apparaître la forêt d'arbres ... On prend une image de référence, le flot-optique est mesuré sur deux images rectifiées, puis l'on change de référence lorsque l'inter-corrélation passe en dessous de 60%. On peut percevoir le relief en profondeur avec une seule caméra, au cours du temps.

Ami age Membre non connecté
-

- Voir le profil du membre Ami age
- Inscrit le : 18/08/2012
- Site internet
- Groupes :
-
Modérateur

_______________________________________________________________________ 
___________________________________ Un petit clic pour Mageia ? =>> CLIQUEZ I C I :
.
___________________________________ Un petit clic pour Mageia ? =>> CLIQUEZ I C I :
.
archimedium Membre non connecté
-
- Voir le profil du membre archimedium
- Inscrit le : 07/08/2012
- Site internet
- Groupes :
Nous avons deux yeux, et les méthodes pour mesurer le relief visible par stéréoscopie, sont très développées. Il existe depuis le début de la photographie, des dispositifs comme le "stéréoscope" qui permet de voir le relief avec deux photographies, naturellement. Il est possible de mesurer le relief, grâce à la géométrie épipolaire, et une mathématique bien connue. Il y a beaucoup de méthodes de mesure, très efficaces et issue de la vision humaine.
Lorsque qu'il s'agit de mesurer le relief avec une unique caméra, les connaissances sont moins établies. Il existe des caméras 3D, dites "RGBD" avec un "D" pour "depth" en anglais qui se traduit par "profondeur". Mais comment fonctionnent-elles ? N'est-il pas envisageable de les améliorer ? Ce que je montre là, ne nécessite l'usage d'aucun "réseau de neurone artificiel". C'est une mesure physique, avec un algorithme classique, qui n'est pas issu de l'I.A. ni d'un gros calculateur :-)
Jybz Membre non connecté
-

- Voir le profil du membre Jybz
- Inscrit le : 10/10/2018
- Groupes :
-
Administrateur

-
Forgeron

Pour le graphique vert et gris, est-il possible de changer les couleurs ? Par exemple : noir pour l'infini et blanc pour le plus proche.
Peut-être aussi avoir une échelle non linéaire pour accentuer le détail dans le fond ?
Téléverser une image : /wiki/hebergement-de-fichiers-sur-mlo
| Arch | Machine | OS |
| x86_64 | lenovo x250 | mga9 |
| armv7hl | bananapro | mga9 |
| aarch64 | Raspberry Pi 4B | mga9 |
archimedium Membre non connecté
-
- Voir le profil du membre archimedium
- Inscrit le : 07/08/2012
- Site internet
- Groupes :


Pour le moment, j'ai choisi "JET", parce qu'il faut bien choisir. Mais il n'y a pas deux personnes distinctes qui aient le même avis sur la couleur. C'est un sujet très clivant. On peut essayer de demander à chacun, mais de là à trouver un consensus, c'est un sujet difficile.
Peut-être avez-vous des palettes de couleurs à me proposer ? Merci ...
Jybz Membre non connecté
-
- Voir le profil du membre Jybz
- Inscrit le : 10/10/2018
- Groupes :
-
Administrateur
-
Forgeron
De plus, le nieau de gris est utilisé pour représenter des objets 3D, et est même la source pour générer les autostéréogrammes.
Cependant, je n'ai pas le mot technique pour nommer cette source noir et blanc.
Téléverser une image : /wiki/hebergement-de-fichiers-sur-mlo
| Arch | Machine | OS |
| x86_64 | lenovo x250 | mga9 |
| armv7hl | bananapro | mga9 |
| aarch64 | Raspberry Pi 4B | mga9 |
Jybz Membre non connecté
-
- Voir le profil du membre Jybz
- Inscrit le : 10/10/2018
- Groupes :
-
Administrateur
-
Forgeron
Téléverser une image : /wiki/hebergement-de-fichiers-sur-mlo
| Arch | Machine | OS |
| x86_64 | lenovo x250 | mga9 |
| armv7hl | bananapro | mga9 |
| aarch64 | Raspberry Pi 4B | mga9 |
archimedium Membre non connecté
-
- Voir le profil du membre archimedium
- Inscrit le : 07/08/2012
- Site internet
- Groupes :
Yuusha Membre non connecté
-
- Voir le profil du membre Yuusha
- Inscrit le : 04/07/2017
- Groupes :
-
Modérateur
-
Administrateur
-
Forgeron
archimedium Membre non connecté
-
- Voir le profil du membre archimedium
- Inscrit le : 07/08/2012
- Site internet
- Groupes :
archimedium Membre non connecté
-
- Voir le profil du membre archimedium
- Inscrit le : 07/08/2012
- Site internet
- Groupes :
https://hebergement.universite-paris-saclay.fr/lecoat/demoweb/monocular_depth.html
Il s'agit de mesurer la disparité monoculaire, comme l'on mesure la disparité stéréoscopique. C'est à dire quantifier la profondeur, avec les images d'une unique caméra. On voit ce relief naturellement, mais il s'agit de le mesurer avec le flot-optique :-)
archimedium Membre non connecté
-
- Voir le profil du membre archimedium
- Inscrit le : 07/08/2012
- Site internet
- Groupes :
Citation :Une page WEB de présentation avec la dernière vidéo d'un drone dans un sous-bois, a été réalisée ici :
https://hebergement.universite-paris-saclay.fr/lecoat/demoweb/monocular_depth.html
Il s'agit de mesurer la disparité monoculaire, comme l'on mesure la disparité stéréoscopique. C'est à dire quantifier la profondeur, avec les images d'une unique caméra. On voit ce relief naturellement, mais il s'agit de le mesurer avec le flot-optique :-)
Jusqu'à présent les images par drone provenaient de forêts en France. Les premières images obtenues étaient dans les Vosges.
Drone en forêt : https://www.youtube.com/watch?v=245yJJrwMQ0
On voit maintenant de plus en plus de drones dans des forêts hors de France. Les sources d'images disponibles se diversifient.
archimedium Membre non connecté
-
- Voir le profil du membre archimedium
- Inscrit le : 07/08/2012
- Site internet
- Groupes :
https://www.youtube.com/watch?v=46VWJ6-YqtY
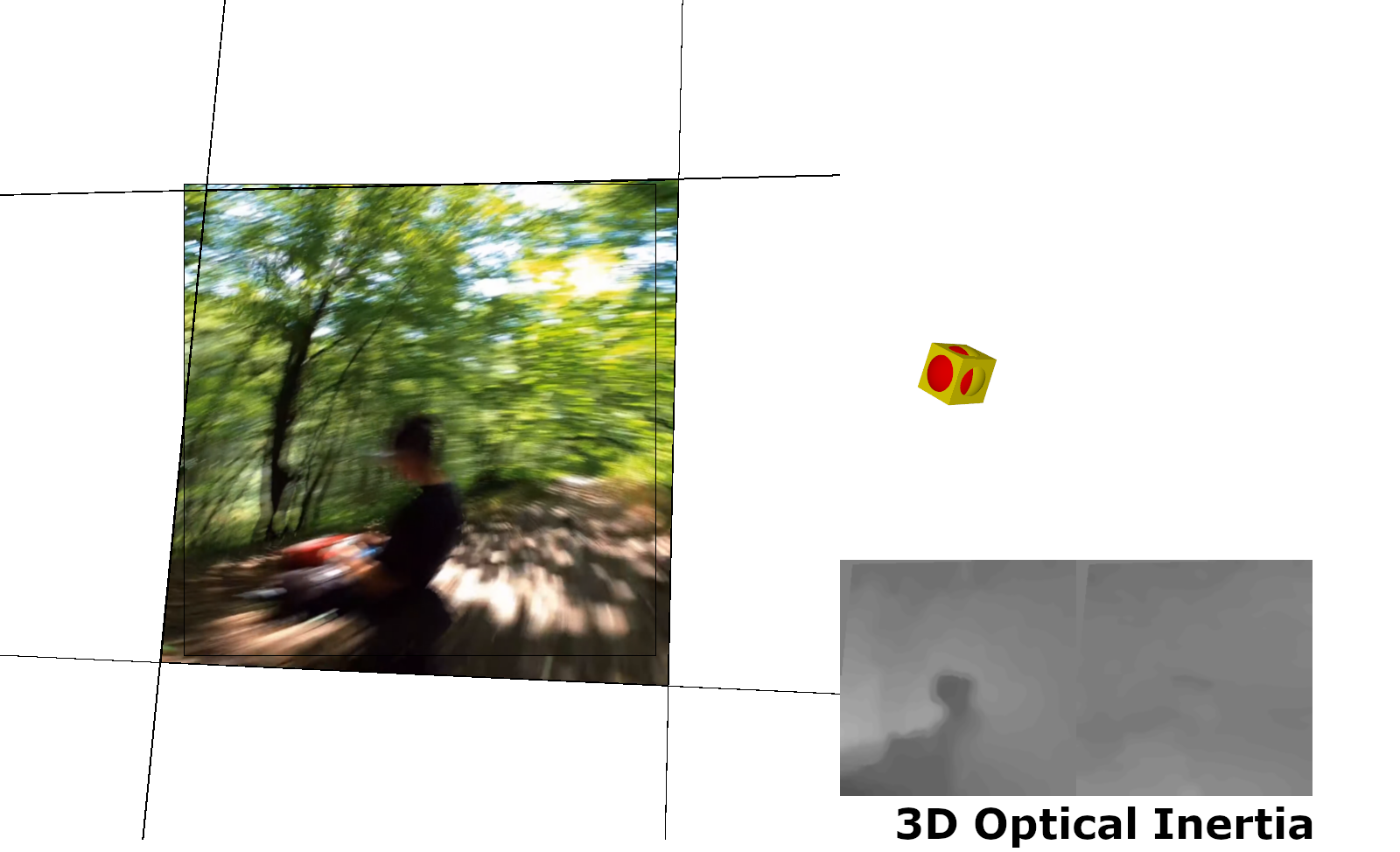
Le déplacement de la caméra est estimé dans les images, par une mesure de mouvement projectif dominant. La présence du randonneur dans la séquence d'images ne gêne pas l'estimation de trajectoire, car le personnage occupe une place dans le champ de vision qui n'est pas dominante. Le mouvement dominant correspond lui au défilement du décors, c'est à dire celui de la forêt par rapport à la caméra observatrice.
archimedium Membre non connecté
-
- Voir le profil du membre archimedium
- Inscrit le : 07/08/2012
- Site internet
- Groupes :
https://www.youtube.com/watch?v=pkDvTPGSUGU
Nous obtenons par ces traitements, la trajectoire du drone dans l'espace : https://sketchfab.com/3d-models/foret-510dabbedc204f5cb763cb879d61d8dd
Ces calculs sur les images ressemblent à une méthode SLAM (Simultaneous Localization And Mapping). Nous obtenons en effet à la fois la localisation (trajectoire) et le relief visible (carte de profondeur en 3D). Mais nous avons affaire à une séquence d'images monoculaire (une seule caméra) et non stéréoscopique (vision humaine). L'intérêt n'est pas seulement esthétique

Répondre
Vous n'êtes pas autorisé à écrire dans cette catégorie